Актуальное исследование, опубликованное в сборнике «Инновационные технологии: теория, инструменты, практика», представляет революционную разработку в рамках программы стратегического академического лидерства «Приоритет 2030».
Современный мир сталкивается с серьезной проблемой загрязнения окружающей среды. Водоемы, леса, пляжи и городские улицы ежедневно страдают от неправильно утилизированных отходов — пластика, бутылок, окурков и прочего мусора. К сожалению, только малая часть населения (1-2%) активно участвует в уборке общественных территорий. В этих условиях автоматизированные системы сбора мусора становятся перспективным решением для поддержания чистоты окружающей среды.
Традиционные роботы-уборщики представляют собой массивные устройства с внутренними накопителями для отходов. Их главный недостаток заключается в неэффективном расходовании ресурсов при обследовании уже чистых участков территории. Такой подход к уборке требует значительных временных и энергетических затрат.
Инновационный проект пермских ученых предлагает революционное решение — систему мобильных роботов для очистки масштабных и труднодоступных территорий. Особенность разработки заключается в способности роботов самостоятельно принимать решения, исследовать местность и обмениваться информацией, что существенно повышает эффективность уборки.
По словам Антона Посягина, доцента кафедры «Автоматика и телемеханика» ПНИПУ, кандидата технических наук, инновационный подход заключается в распределении задач между роботами разного назначения. Компактные устройства занимаются разведкой и картографированием загрязненных участков, а более крупные роботы выполняют непосредственно сбор мусора по составленным картам. Такое разделение труда минимизирует энергозатраты и снижает риск повреждения территории тяжелой техникой.
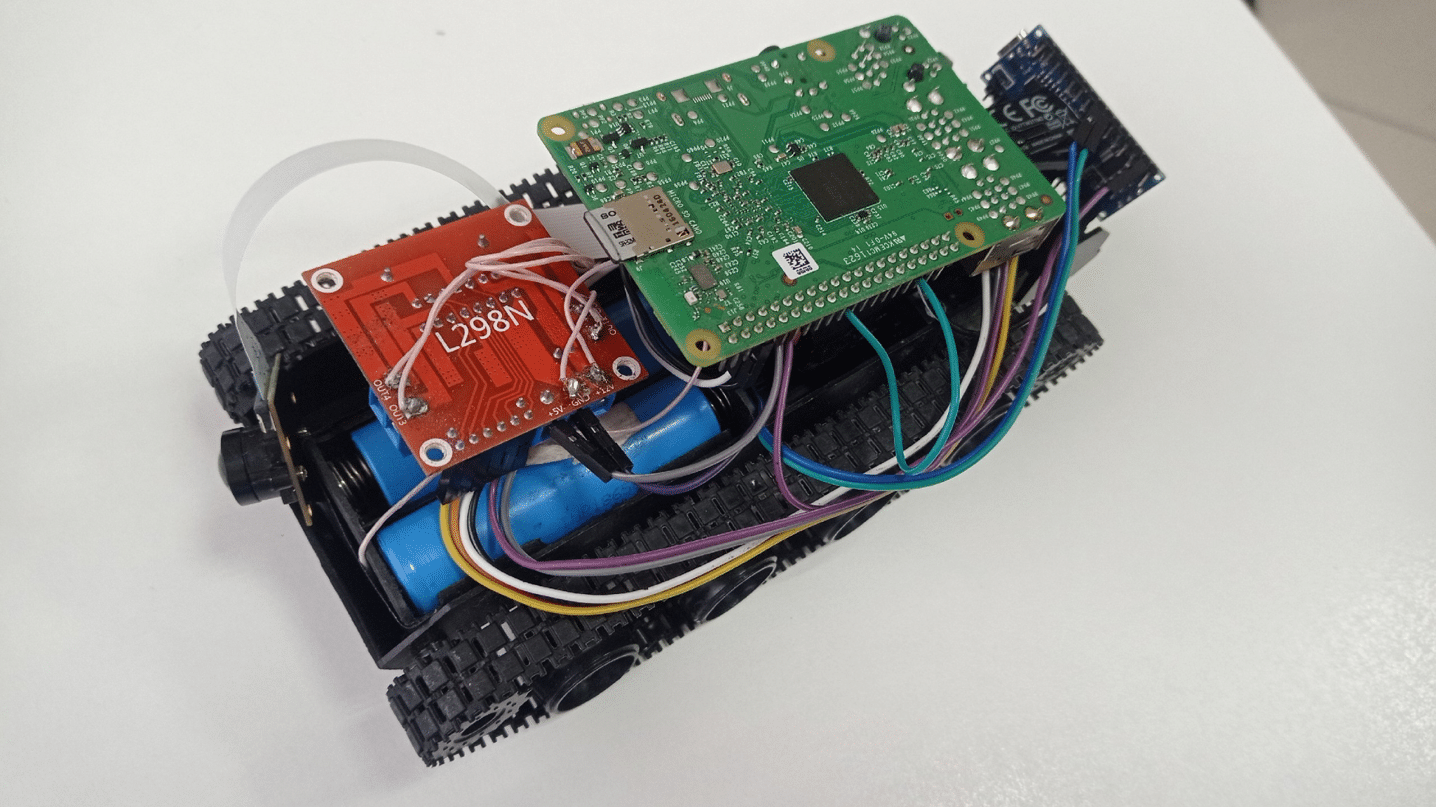
В рамках проекта создан прототип робота-разведчика размером с крупную радиоуправляемую машину. Устройство оснащено гусеничной ходовой частью для повышенной проходимости, что делает его универсальным для различных типов местности.
Техническое оснащение робота включает современные двигатели, систему видеонаблюдения, модуль радиосвязи для координации с другими устройствами и гироакселерометр для точного позиционирования и навигации.
Исследователи разработали специальные алгоритмы движения для оптимизации работы роботов. Наиболее эффективными оказались схемы «спираль» и «поиск центра местности». При тестировании в симуляторе с различным количеством роботов алгоритм «спираль» продемонстрировал впечатляющие результаты, сократив время выполнения задачи вдвое и значительно уменьшив количество необходимых перемещений.
Внедрение этой инновационной системы роботов-уборщиков открывает новые перспективы в борьбе с загрязнением окружающей среды. Автоматизированная система способна эффективно очищать обширные территории, включая леса, степи и другие труднодоступные места, обеспечивая быстрый и качественный сбор бытовых отходов.